PSVR2 Tether Crane
Automated VR tether management for the PS5 (PSVR2)
Git RepoThe problem was simple...
This particular solution was... decidedly sub-optimal.
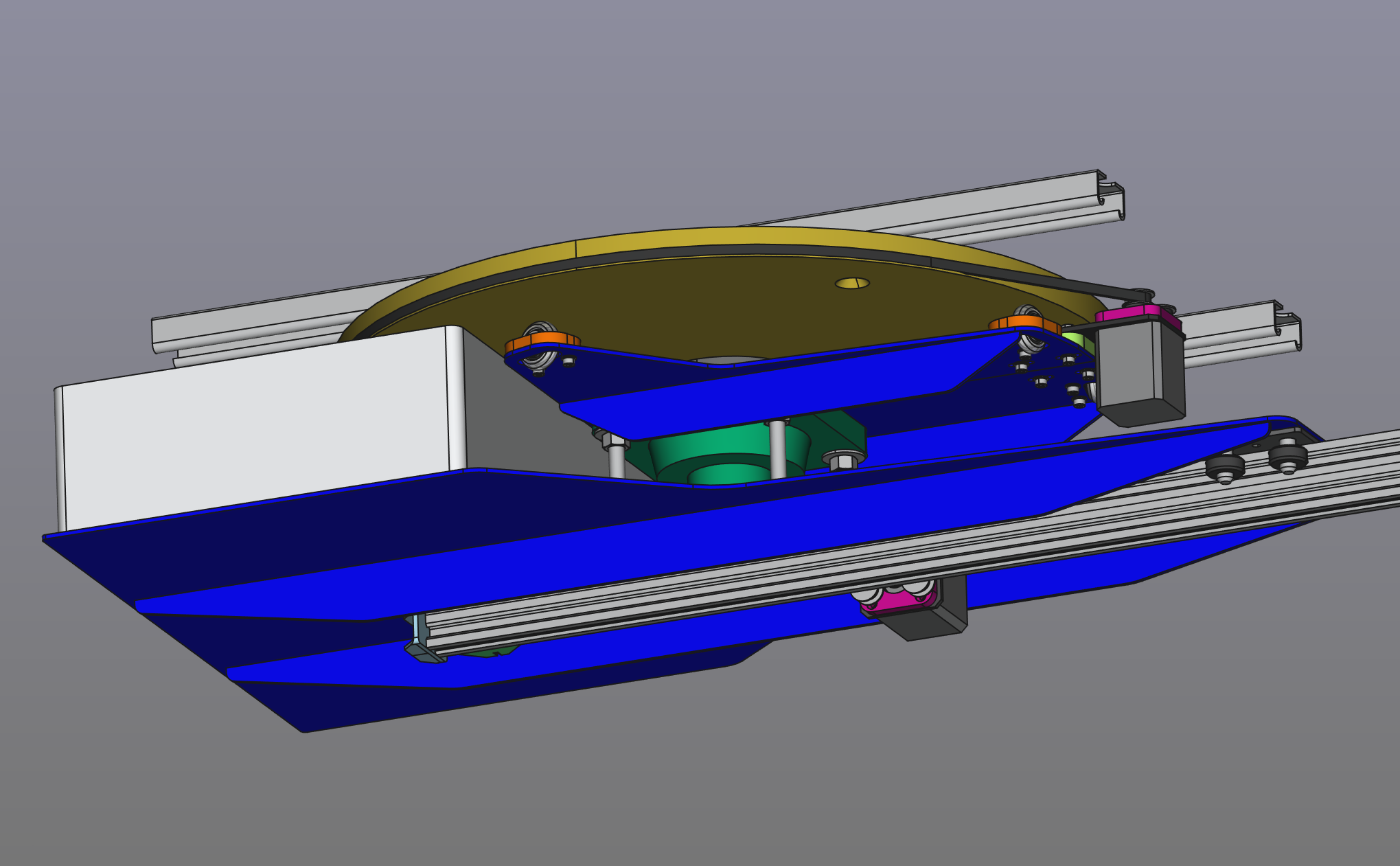
Full CAD Assembly
See the demonstration YouTube video here:
Demo VideoCheck out the build video here:
Build VideoA simpler version was also considered:
Simplified VersionRotational Positioning Code
#include <AccelStepper.h>
#define STEPPER_EN_PIN 8
#define AXIS_X_POT_PIN A0
#define AXIS_Y_POT_PIN A1
#define STEPPER_X_STEP_PIN 2
#define STEPPER_X_DIR_PIN 5
#define STEPPER_Y_STEP_PIN 3
#define STEPPER_Y_DIR_PIN 6
// Define some steppers and the pins the will use
AccelStepper axisX(AccelStepper::DRIVER, STEPPER_X_STEP_PIN, STEPPER_X_DIR_PIN);
AccelStepper axisY(AccelStepper::DRIVER, STEPPER_Y_STEP_PIN, STEPPER_Y_DIR_PIN);
bool _lastDeflectX;
bool _lastDeflectY;
void setup()
{
pinMode(STEPPER_EN_PIN, OUTPUT);
axisX.setMaxSpeed(2000.0);
axisX.setAcceleration(200.0);
axisY.setMaxSpeed(4000.0);
axisY.setAcceleration(2000.0);
digitalWrite(STEPPER_EN_PIN, 0); // Enable stepper motors
}
void loop()
{
int potX = analogRead(AXIS_X_POT_PIN) - 512;
int potY = analogRead(AXIS_Y_POT_PIN) - 512;
bool deflectX = abs(potX) > 5;
if (deflectX) {
axisX.setMaxSpeed(potX * 2.0);
axisX.runSpeedAccel(potX > 0);
}
else {
if (_lastDeflectX) {
axisX.stop();
}
axisX.run();
}
bool deflectY = abs(potY) > 5;
if (deflectY) {
axisY.setMaxSpeed(potY * 4.0);
axisY.runSpeedAccel(potY > 0);
}
else {
if (_lastDeflectY) {
axisY.stop();
}
axisY.run();
}
_lastDeflectX = deflectX;
_lastDeflectY = deflectY;
}
Case closed... for now.