Sunk Cost Woes
Sometimes, the path of progress is found to lead to an undesirable outcome. Time spent on anything tends to give it sentimental value, which makes pruning the dead branches painful. Maybe noting these discarded ideas here can ease the sting of the perceived loss.
I had developed a steering method for my tile swarm VR treadmill prototype. (HoverComb) which distributes the steer angle from a central geared hub.
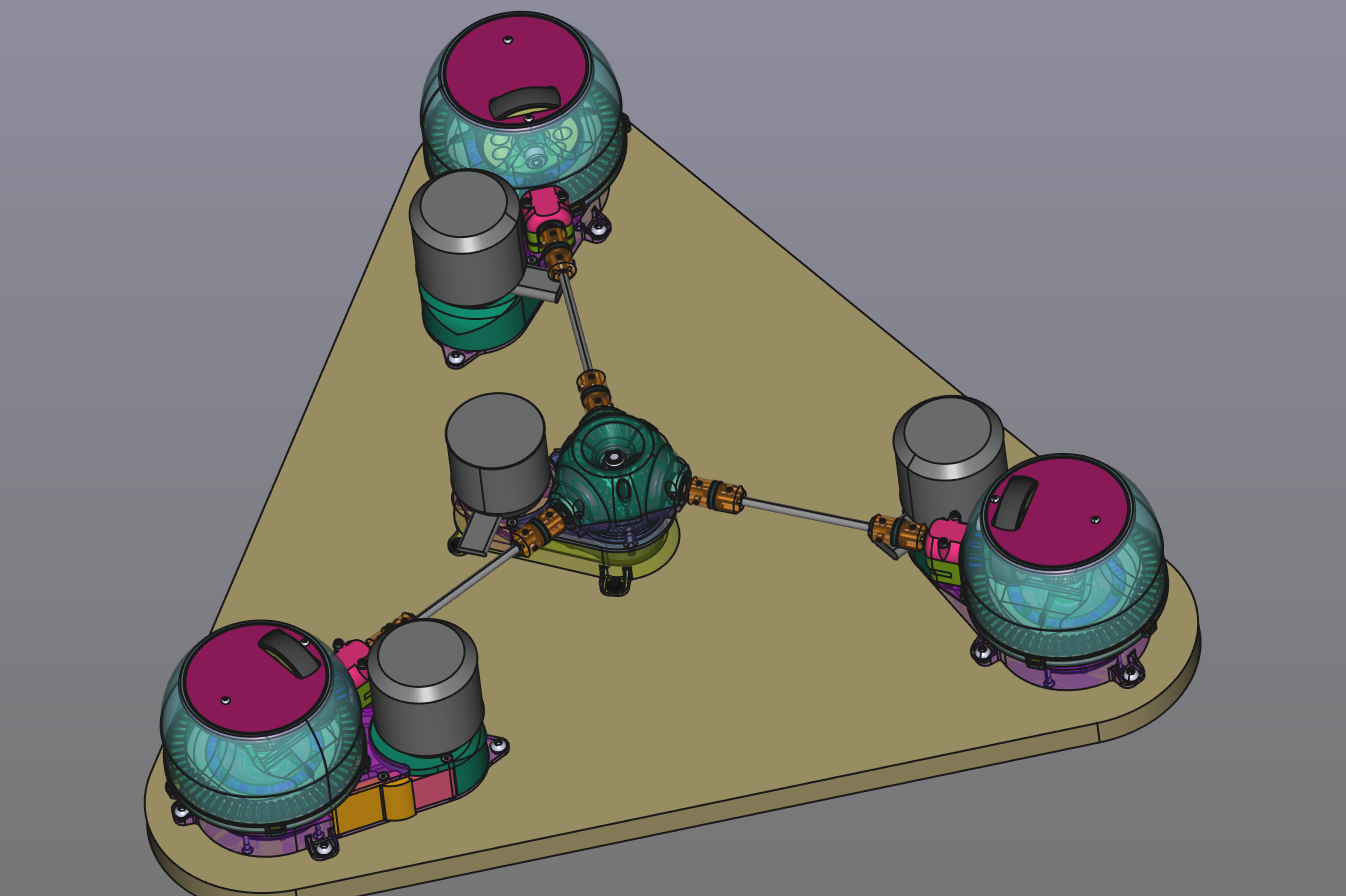
central distributed steering design
I decided to ditch the central steering method in favor of individual small stepper motors at each wheel. There are several advantages:
- Simplicity - Even though there are more motors, there are fewer gears and fewer 3D-printed parts.
- Cost - No central motor means one fewer battery pack, substantially reducing cost.
- Accuracy - The belt drive eliminates backlash from the pinion and hub gears.
- Calibration - The space previously used for the pinion and ring gears inside the wheel shroud can be used for a rotation offset optical sensor to individually calibrate the steering angle offset for each wheel.
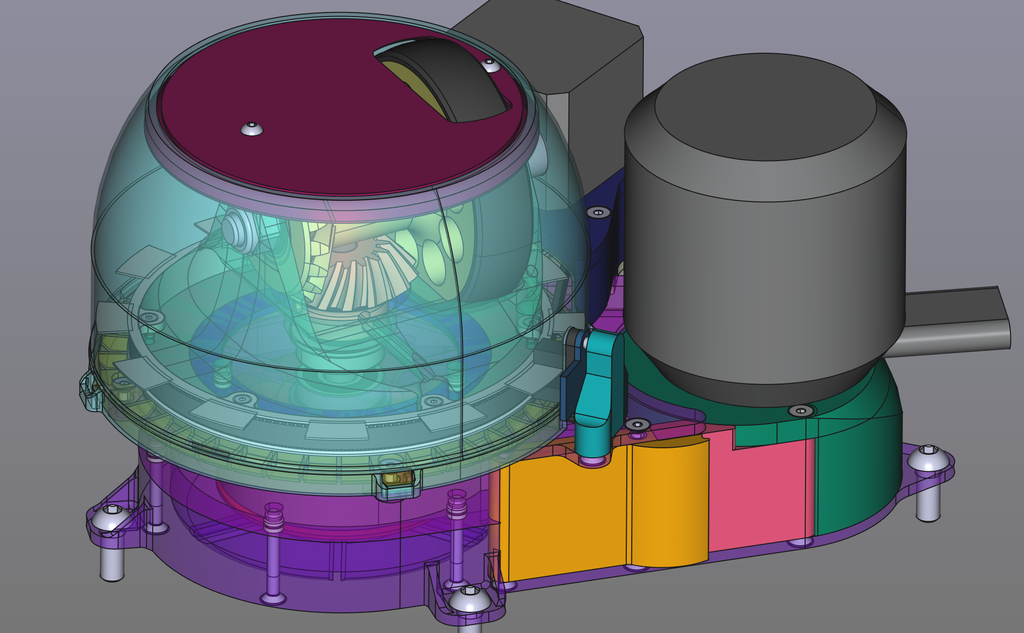
new wheel module with stepper belt drive and integrated rotation offset sensor.